Partie commande¶
- 1. Génération 4 MLI indépendants
Le pilotage d'un moteur à courant continu se fait souvent par l'intermédiaire d'un hacheur 4 quadrants. Les hacheurs sont dotés de 4 transistors qui sont eux-même commandés à l'aide de signaux de type modulation de la largeur d'impulsion (MLI). Il y a plusieurs moyens de commander les MLI, dans notre cas, nous optons pour générer 4 signaux MLI, un pour chaque transistor. Ce choix permet d'utiliser le hacheur de façon complexe, pour tourner le moteur dans les deux sens, d'arrêter le moteur et une alimentation intelligente pour réduire la consommation.
La loi de commande des MLI est composée de 4 phases, dont 2 sont similaires:
- Une première phase consiste à alimenter le moteur
- Une deuxième phase on met en roue libre 2 transistors
- La troisième phase on alimente de nouveau le moteur
- Finalement on met en roue libre deux transistors différents de la deuxième phase
Cette loi de commande permet d'utiliser les 4 transistors de façon homogène, donc l'usure est au même rythme pour chaque transistor.
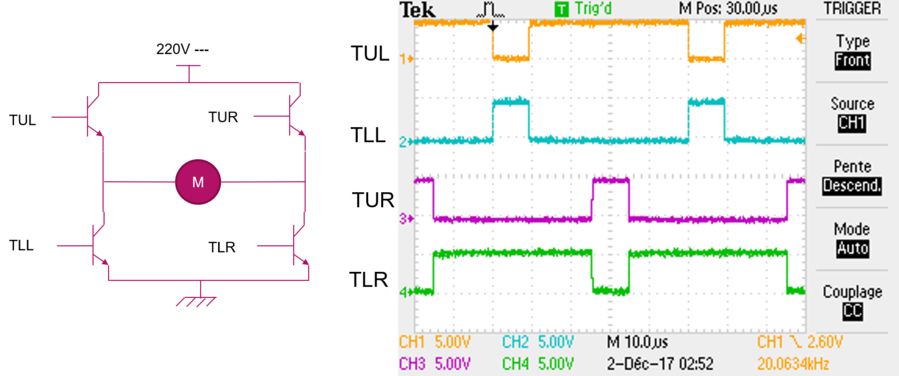
Ci-dessous une schéma d'un hacheur (à gauche) et une acquisition des 4 signaux commandant le hacheur (à droite). A noter que pour le hacheur, les diodes libres ne sont pas représentées, et les signaux relevés sont en sortie du microcontrôleur.
La circulation du courant quand le moteur tourne dans un sens, se décompose donc de 3 façon différentes. Voici-ci dessous un exemple:
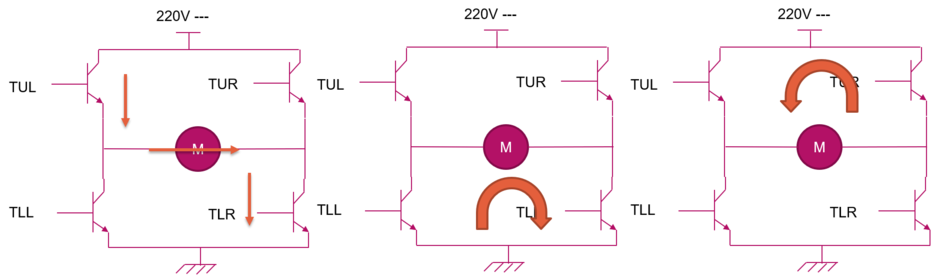
- A gauche: le moteur est alimenté
- Au milieu: le courant est en roue libre dans l'étage inférieur du hacheur
- A droite: le courant est en roue libre dans l'étage supérieur du hacheur
Ci-dessous figure les liens entre les différentes phases de circulation du courant et la loi de commande:
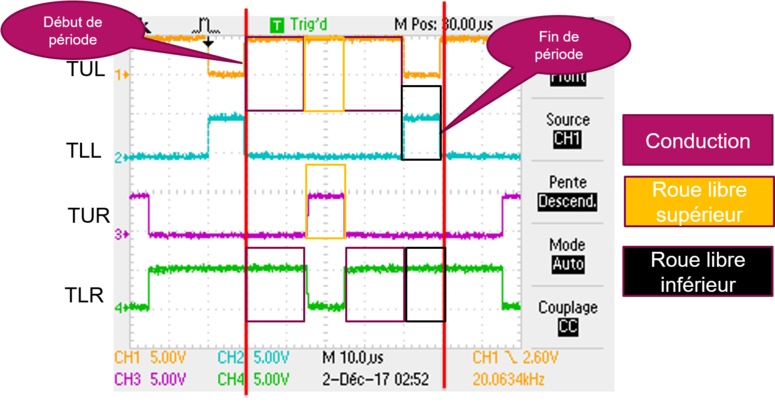
A remarquer que les deux phases de conduction ont la même durée, et les deux phases de roue libre ont une durée identique. De ce fait, on obtient au niveau du moteur un signal qui est deux fois plus rapide en fréquence, par rapport à la loi de commande.
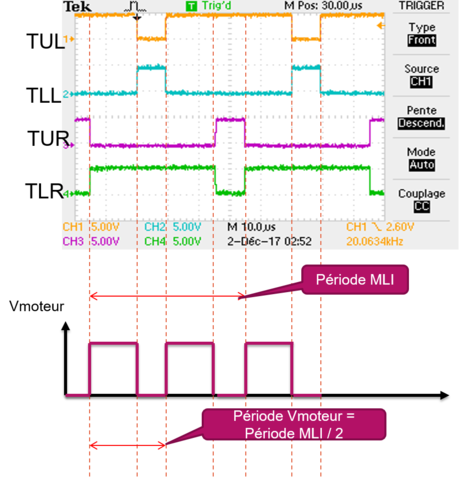
Le choix de la fréquence de travail à appliquer sur le hacheur , et donc le moteur, n'est pas anodin car les transistors émettent un son selon la fréquence. La fréquence minimum pour que le bruit soit inaudible pour l'oreille humain est de 20 kHz. Or, après un test, nous avons remarqué que les transistors que nous avons choisi n'émet pas de bruit à une fréquence inférieur à 20 kHz, nous avons opter donner les signaux MLI une fréquence de 10 kHz, pour obtenir la fréquence de 20 kHz au niveau du moteur. Cela a pour effet de doubler la durée de vie des transistors s'ils devaient travailler à 20 kHz.
- 2. Liaison PC
Il a été convenu que la liaison entre un ordinateur et le système se fasse par USB, ce connecteur étant le plus répandu et donc répond à un large éventail de compatibilité connectique. Le microcontrôleur choisi cependant ne gère pas l'USB, on utilise alors un interface entre l'USB et un autre protocole de communication, ici l'UART pour sa simplicité de mise en oeuvre et son débit bits par seconde est convenable à l'application.
UART
- 3. Détection de surintensité
Le système doit pouvoir observer le courant circulant dans le moteur et enclencher un mécanisme de sécurité si le courant dépasse un seuil de courant limite et donc évitant la casse du moteur. Pour ce faire, on utilise un capteur de courant où la sortie est relié au microcontrôleur. Le capteur délivre une tension image du courant moteur au microcontrôleur qui la numérisera à l'aide d'un convertisseur analogique-numérique (CAN). Le microcontrôleur dès lors compare la valeur numérique à un seuil. Si le seuil n'est pas atteint, le fonctionnement reste inchangé. Dans le cas où le seuil est franchi, le fonctionnement du système est encore normal. En effet, on ne s'intéresse pas à des pics de courant éphémères, mais à une hausse de courant anormal et persistant. On doit donc mesurer la durée où le courant dépasse le seuil de courant limite. Ceci est accompli en mesurant le courant de façon périodique, et de compter le dépassement successive du seuil de courant limite. Une fois le comptage excède une durée limite, le courant est considéré surintensité et le programme se met en arrêt d'urgence. Ci-dessous figure l'organigramme représentant ce paragraphe:

Mis à jour par Anonyme il y a plus de 7 ans · 15 révisions