Rapport technique » Historique » Révision 5
« Précédent |
Révision 5/25
(diff)
| Suivant »
Nicolas DELATTRE, 19/01/2025 18:43
Rapport technique - Potentiostat solaire
Client : CORNET Jean-François
Référent Polytech : LAFFONT Jacques
Tuteur industriel : KERSULEC François
Étudiants : DELATTRE Nicolas - PRINET Thomas
Polytech Clermont – Génie Électrique
19/01/2025
- Contenu
- 1. MODELISATION ELECTRIQUE D’UNE CELLULE PEC
- 2. DIMENSIONNEMENT DU CIRCUIT ELECTRONIQUE
- 4. PROGRAMMATION DU MICROCONTROLEUR
- 4. TESTS ET RESULTATS
1. MODELISATION ELECTRIQUE D’UNE CELLULE PEC¶
Afin de pouvoir dimensionner ainsi que de valider le fonctionnement du système, il a été nécessaire de s’intéresser à l’aspect électronique de la cellule. A l’issu, cette modélisation va permettre de définir les ordres de grandeurs des courants et tensions appliqués à la cellule. Aussi, la cellule PEC n’étant pas à disposition durant le développement de ce système, cette modélisation sera nécessaire afin de pouvoir réaliser des tests avec une charge proche du système réel.
Dans le cadre de ce projet, l’étude a été réalisée dans l’optique de l’utilisation de cellules idéales de surfaces éclairée de 700mm². Deux types de photoanodes ont été abordées :
- Meilleure photoanode existante (Majumda et coll)
- Photoanode parfaite idéale (Sivula), la meilleure qu’il serait théoriquement possible de créer.
La première étape était de comparer l’évolution des potentiels de la cathode et des photoanodes. Ces évolutions sont visibles dans la figure 3 :

Figure 3 : Evolution des potentiels des électrodes en fonction de la densité de courant
Sur cette figure les potentiels sont donnés par rapport à une référence se type Ag-AgCl. En bleu est représenté l’évolution de la photoanode existante, en jaune celle de la photoanode idéale et en rouge l’évolution de la contre électrode (cathode).
Il est visible que l’écart entre les deux technologies de photoanodes va fortement impacter la modélisation de la charge.
Suite à cela, il était donc possible d’obtenir l’évolution de la différence entre le potentiel de la photoanode et de la contre-électrode en fonction de la densité de courant (figure 4-5) et de la surtension appliqué sur la photoanode (figure 6-7).

Figure 4 : Ddp vs Densité de courant (sivula)

Figure 5 : Ddp vs Densité de courant (fernanda)

Figure 6 : Ddp vs Densité de courant (fernanda)

Figure 7 : Ddp vs Surtension (fernanda)
Cette partie détaille tout le développement mené jusqu’à obtenir un modèle électronique équivalent
2. DIMENSIONNEMENT DU CIRCUIT ELECTRONIQUE¶
Cette section détaille tout la démarche réalisée afin de dimensionner les composants de chaque sous-circuit du système final.
2.1. CONVERTISSEUR DC/DC¶
Présentation des montages boost pour les parties Boost Potentiostat et Boost alim.
2.2. CIRCUITS DE MESURES¶
Présentation du microcontrôleur et des lectures de tension.
2.3. ALIMENTATION MICROCONTROLEUR¶
Présentation du bouton de démarrage, commut alim et protec alim.
2.4. INTERFACE HOMME MACHINE (IHM)¶
Présentation du bornier PICKIT, comm USB, affichage LED, potentiomètre.
4. PROGRAMMATION DU MICROCONTROLEUR¶
La production d'hydrogène par photoélectrolyse de l’eau nécessite un contrôle précis des paramètres électriques pour garantir une réaction chimique optimale. En effet, actuellement, le simple fait de soumettre une cellule photoélectrochimique à la lumière visible du soleil ne permet pas à la réaction d’avoir lieu. Dans ce contexte, le projet Potentiostat Solaire vise à transformer l'énergie lumineuse restante (Infrarouge) en une surtension stable, permettant ainsi à l’électrolyse de s’effectuer correctement.
Cette partie se concentre sur le code de la partie commande du projet, en justifiant l’architecture choisie et le rôle de chaque fonction.
4.1. ROLE DE LA REGULATION¶
Avant d’aborder l’architecture du code de régulation, il est important de comprendre où la régulation va s’opérer. La figure 1 ci-dessous, présente le schéma de la cellule électrochimique. Cette dernière est composée de trois électrodes : une cathode, une électrode de référence et une photoanode.
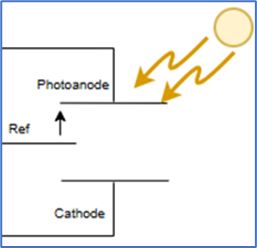
Figure 26 : Schéma cellule électrochimique
Lorsque la photo-anode est soumise à la lumière du soleil, une différence de potentiels entre la photo-anode et la référence apparaît. Il s’agit du potentiel d’abandon. Cependant, ce potentiel permet juste d’amorcer la réaction mais n’est pas suffisant pour réaliser l’électrolyse de l’eau. C’est pourquoi il est nécessaire d’appliquer une surtension entre ces deux électrodes. Cette dernière doit être réglable entre 0.1V et 1V par rapport au potentiel d’abandon.
De plus, le potentiel de référence étant fixé par les caractéristiques physiques de la cellule, il n’est pas possible de le contrôler. C’est pourquoi l’idée est donc de faire varier la tension entre la photo-anode et la cathode afin d’obtenir la surtension souhaitée. La figure 2 illustre le principe.
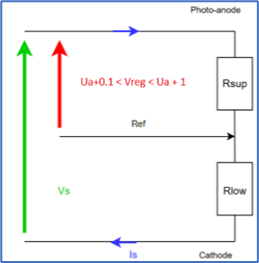
Figure 27 : Schéma électrique équivalent cellule électrochimique
C’est donc la tension Vs qui est contrôlée de façon à obtenir la bonne surtension Vreg. Pour diminuer la surtension, il suffit alors de diminuer Vs et inversement.
Enfin, la tension Vs est fourni par un montage boost ce qui signifie que son contrôle se fait en modifiant le rapport cyclique de la commande PWM appliquée au montage.
4.2. STRUCTURE DU CODE ET ALGORITHME UTILISEE¶
Maintenant que le principe de régulation a été expliqué, il est possible de passer à la présentation de l’algorithme utilisé, ainsi qu’à la description de chaque étape. Le programme a été conçu avec MPLAB pour un microcontrôleur PIC18f45k50.
4.2.1. ALGORITHME GENERAL¶
Le système devant être autonome en énergie, ce dernier est alimenté à partir d’une cellule photovoltaïque fournissant une puissance de 5.8W pour une tension de 0.7V. Cette tension ne permettant pas directement d’alimenter le microcontrôleur il est nécessaire de l’augmenter. Un deuxième montage boost a été implémenté de façon à obtenir une tension de 5V. Une deuxième régulation a donc été réalisée mais elle ne sera pas détaillée car elle est similaire, en tout point, à la régulation principale. La figure 3 présente la structure du programme global.
L’architecture choisie est une machine à deux états qui sont :- Etat DEMARRAGE : Dans cet état, le microcontrôleur est alimenté à partir d’une batterie externe. Le microcontrôleur démarre la régulation de son alimentation et attend de mesurer cent fois la tension souhaitée (5V) avant de passer à l’état suivant.
- Etat REGULATION : Dans cet état, le microcontrôleur n’est plus alimenté par la batterie. Ce dernier réalise maintenant la régulation de sa tension d’alimentation ainsi que la régulation de la surtension appliquée à la cellule électrochimique. Si la tension d’alimentation devient trop faible, le microcontrôleur bascule de nouveau dans l’état de démarrage.
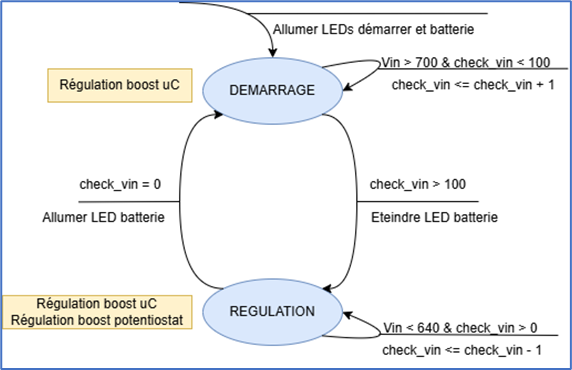
Figure 28 : Architecture utilisée
- Lectures des tensions nécessaires. Il s’agit des potentiels sur la référence et la photoanode ainsi que de la tension de consigne. La consigne est commandée avec un potentiomètre.
- Calcul de l’erreur par rapport à la consigne et calcul de la correction nécessaire.
- Application de la correction sur la commande du montage boost.
L’appel des fonctions de régulation est effectué périodiquement grâce à un timer. Le fonctionnement de chaque étape est décrit ci-après.
4.2.2. DESCRIPTION ETAPE PAR ETAPE¶
Les étapes vont être décrite dans l’ordre où elles sont exécutées.
4.2.3. APPEL DE LA FONCTION DE REGULATION¶
Pour que la régulation fonctionne correctement, la fonction associée doit être appelée périodiquement. Un timer est donc présent pour réaliser ces appels de fonction. C’est le timer 2 du PIC18f45k50 qui est utilisé. Il s’agit d’un timer sur 8 bits paramétré pour fonctionner à 16kHz. Lorsqu’il arrive à sa valeur maximale, soit 255, une interruption d’overflow est déclenchée ce qui permet d’appeler la fonction de régulation. Le timer est ensuite remis à zéro et recommence à compter.
4.2.4. LECTURE DES TENSIONS¶
Chaque lecture de tension est effectuée au moyen d’un ADC sur 10 bits. La valeur obtenue en binaire est donc comprise entre 0 et 1023. Une valeur de 0 correspond à une tension de 0V et une valeur de 1023 correspond à une tension de 4V. Les ADC sont configurés pour être déclenchés avec le CCP2 (module Capture/Compare/PWM du timer 2). Il est utilisé une tension de référence interne fixe de 4.096V. De plus, la fréquence d’acquisition est de 1MHz et les résultats obtenus sont alignés à droite.
Cependant, afin de limiter le bruit lié à la lecture, il est important de réaliser les lectures au bon moment. En effet, la régulation passe par la modification de la commande d’un montage boost. Cette commande est en réalité un simple signal PWM (Pulse With Modulation). Il s’agit d’un signal carré alternant entre une valeur maximale (ici 5V) et une valeur minimale (ici 0V). Ce signal permet de faire commuter le transistor présent dans le montage boost, ce qui introduit, à chaque commutation, du bruit sur la tension de sortie. Ce signal est également généré à partir du timer 2 ce qui est problématique.
Afin de pallier cela, un deuxième timer a été ajouté. Ce dernier a pour rôle d’appeler la fonction de régulation juste avant la commutation du transistor. Il s’agit du timer 0, lui aussi sur 8 bits et fonctionnant à 16kHz. L’objectif étant qu’il déclenche la fonction de régulation avant la fin du timer 2. Dans ce but, le timer 0 ne compte pas jusqu’à 255 mais jusqu’à 156, ce qui permet d’obtenir le fonctionnement illustrer en figure 4.
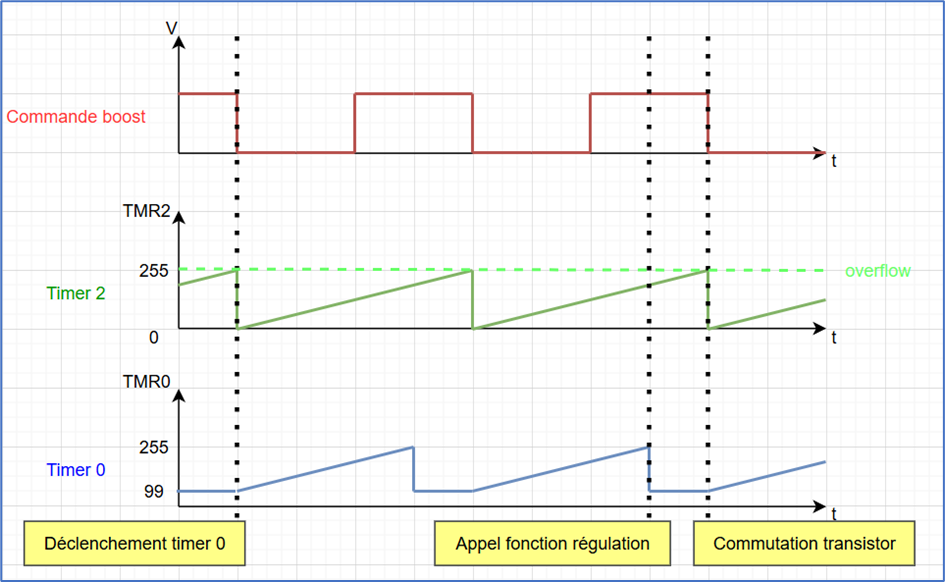
Figure 29 : Timing lecture tensions
Lorsque le timer 2 atteint son overflow, le timer 0 est alors démarré. Etant donné qu’il ne compte pas jusqu’à 255, le timer 0 atteint son overflow avant le timer 2, ce qui permet d’appeler la fonction de régulation avant la prochaine commutation du transistor.
4. TESTS ET RESULTATS¶
4.1. PRESENTATION DU TEST¶
4.2. PRESENTATION DES RESULTATS¶
Mis à jour par Nicolas DELATTRE il y a 5 mois · 5 révisions