Communication Série embarquée¶
La mise en place des communications a été contrainte par le respect des tensions utilisées.
Le RX62T fonctionnant en 3.3V et l'Arduino en 5V, il fallait donc diminuer la tension de sortie du port UART2 de l’Arduino.
Il a suffi d’ajouter 2 résistances sur la broche TX : 1.5kΩ et 3.3kΩ.
En attendant le développement du RX62T et puis pour palier aux problèmes de ce dernier, nous avons testé les communications avec un ordinateur. Ce dernier était utilisé en lieu et place du RX.
Pour communiquer avec l'ordinateur, nous utilisions un adaptateur USB/RS-232 qui sortait avec un connecteur DB9. Afin de faire le pont entre ce connecteur et la carte Arduino, nous avons donc mis en place un montage autour d’un MAX202. Pour réguler les tensions,il fallait également faire la même démarche avec l’ordinateur.
Voici le schéma KiCad de notre montage: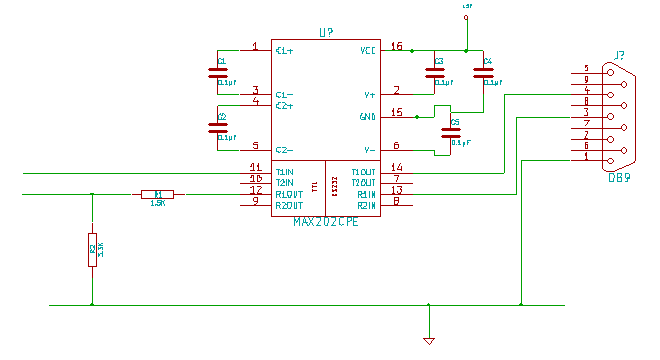
Ce montage a également été utilisé pour la communication entre les autres cartes (RX62T et module WiFi) et l'ordinateur afin de tester ces dernières.
Après l’adaptation des tensions, la connexion entre ArduPilot et RX est simple, puisque nous avons décidé d'utiliser une connexion TTL donc sanc contrôle. Ainsi nous avons une même masse, et la broche RX de l’un se relie sur la broche TX de l’autre.
Dernière mise à jour : 27/03/2013 11h54
Auteur : Pierre GUINAULT
Mis à jour par Anonyme il y a environ 12 ans · 3 révisions