Actions
Projet QuadriCoptère¶
Projet 2013 (Drone)¶
Préambule¶
Introduction ¶
Remerciements ¶
Bilan de l'existant¶
Organisation du projet¶
Choix techniques¶
Matériel :
Carte ArduPilot et capteurs¶
Microcontrôleur RX62¶
Moteurs¶
Algorithmes & stabilisation
Aspect physique¶
Algorithme de stabilisation PID¶
Mixage des voies RC¶
Traitement de la centrale inertielle¶
Communications
Protocoles de communication¶
Protocole Ethernet/Wifi V1¶
Protocole de communication série V1¶
Types des trames¶
Série carte développement RX62N¶
Communication série embarquée¶
Configuration du module WiFi¶
Implémentations
Programmation sur RX¶
Programmation sur ArduPilot¶
Bilan
Bilan technique ¶
Pistes d'évolution futures¶
Project summary¶
Bibliographie ¶
Annexes¶
Projet 2013 (Simulateur & IHM)¶
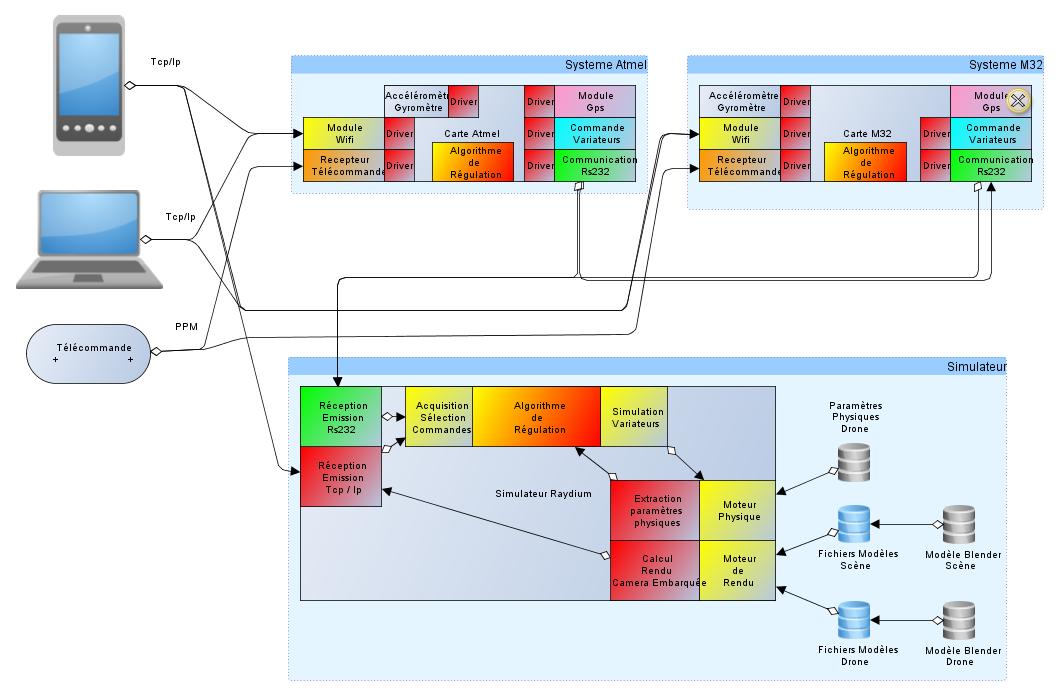
Structure générale du côté simulation¶
IHM¶
Analyse et Conception¶
Description de l’IHM¶
Simulateur Raydium¶
Le déroulement du projet¶
Blender¶
La mise en réseau du Simulateur¶
L'application Android¶
Refonte de l'application¶
Réseau Android¶
Comment faire ...¶
... pour mettre le simulateur sous Linux tout en utilisant QtCreator¶
... installer toutes les bibliothèques pour l'IHM ¶
Bilan¶
Projet 2012 (archive)¶
Sommaire¶
Remerciements¶
Introduction¶
Présentation synthétique du projet¶
Gestion de projet¶
Construction du drone¶
Microcontrôleur Renesas¶
Carte électronique et asservissement du drone¶
Application Android¶
Communications¶
Modélisation 3D¶
Simulateur¶
Bilan Technique¶
Conclusion¶
Résumé en anglais¶
Bibliographie¶
Lexique¶
Annexe¶
Mis à jour par Anonyme il y a environ 12 ans · 93 révisions