Mixage des voies RC¶
Lors de l’utilisation de la commande RC, il est nécessaire de mixer les canaux pour appliquer les mouvements réalisés à l’aide des joysticks. Ces actionnements vont agir sur la commande envoyée à chaque moteur : soit une augmentation du signal PWM, soit une diminution.
L’élaboration de cet algorithme a été simple, il a suffi de réfléchir à l’incidence de la manœuvre demandée sur chaque moteur. Pour chaque moteur, la commande principale est le « Throttle » (les gaz qui permettent de faire monter ou descendre le drone, à laquelle on ajoutera ou soustraira les autres commandes affectée d’un coefficient.
Par exemple, pour avancer le drone va s’incliner vers l’avant. Les moteurs avant, 1 et 2, vont devoir ralentir et les moteurs arrière, 3 et 4, vont accélérer. On va donc soustraire le signal reçu sur le canal 2, responsable de cette inclinaison, aux commandes des moteurs 1 et 2 et l’ajouter aux 2 autres. Afin d’améliorer la réponse, on applique un coefficient déterminé expérimentalement à chaque commande.
L'implémentation de cet algorithme est disponible dans le programme test "RC_control"
Pour rappel, voici la disposition des moteurs de notre drone :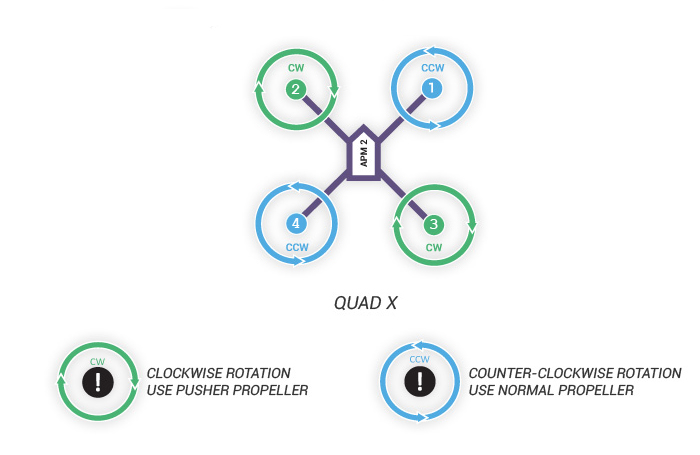
Le tableau suivant résume l’état de chaque moteur selon les mouvements :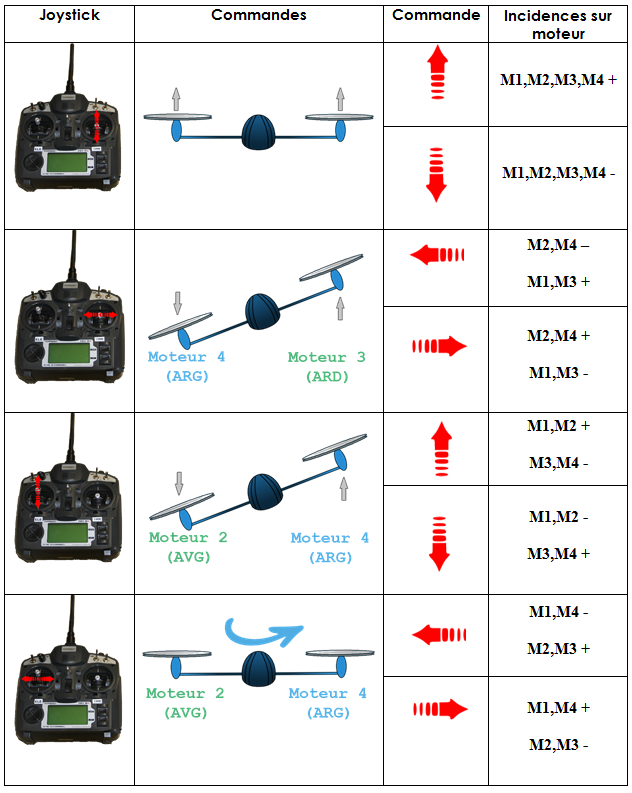
Dernière mise à jour : 25/03/2013 16h38
Auteur : Pierre GUINAULT
Mis à jour par Anonyme il y a environ 12 ans · 8 révisions