Moteurs, ESC & hélices¶
Nos moteurs sont de type brushless outrunner(ou moteur synchrone courant continu), c’est-à-dire qu’ils sont constitués d’aimants permanents(rotor) et de bobines(stator) et que le rotor est situé autour du stator. Ils utilisent la force contre électromotrice pour détecter la position du rotor en mesurant les variations des champs magnétiques. On trouve également un système électronique de commande pour permettre la commutation du courant dans le stator (sur le schéma : anneau à l’extérieur).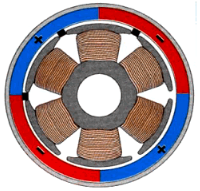
Leur fonctionnement se base sur la répulsion magnétique. Les bobines sont alimentées de façon séquentielle. Cela crée un champ magnétique tournant à la même fréquence que les tensions d’alimentation. L’aimant permanent du rotor cherche à chaque instant à s’orienter dans le sens du champ. Pour que le moteur brushless tourne les tensions d’alimentation doivent être adaptées continuellement pour que le champ reste en avance sur la position du rotor, et ainsi créer un couple moteur. L’animation ci contre montre le fonctionnement. Ainsi sans contacts, il n’y a ni usure, ni frottements contrairement au moteur à courant continu. 
Pour contrôler la vitesse des moteurs, ils sont associés avec des ESC (Electronic Speed Controller). Le rôle de ces contrôleurs est de réguler la tension pour donner plus ou moins de vitesse au moteur en abaissant la tension d'entrée par découpage de celle-ci. Il y a donc deux systèmes distincts dans le contrôleur : le premier réagit à la consigne venant de la carte et fournit une tension d’alimentation, mais laisse passer l'ampérage dont il aura besoin. Le second, en fonction de la position du rotor, commute le bon circuit (en se servant des informations sur la position du rotor reçue par le moteur et donc quel circuit il faut commuter), aux bornes duquel on va retrouver cette tension.
Dernière mise à jour : 24/03/2013 22h40
Auteurs : Pierre GUINAULT
Mis à jour par Anonyme il y a environ 12 ans · 6 révisions