Simulateur Raydium¶
L’existant¶
Au tout départ, le drone virtuel évoluait dans un environnement 3D représentant la salle C21 ainsi que le bâtiment informatique de l’IUT. Le modèle graphique du quadricoptère correspondait à la forme du drone existant et s’accompagner de textures adéquates.
Un algorithme de stabilisation était déjà présent et bien que l’algorithme en lui-même soit correct il n’était pas mis en application comme il le fallait. Tout cela était vu à travers une caméra simple qui suivait le drone et via deux autres cameras, une située à l’avant et l’autre en dessous, au centre du drone dont les vues sont respectivement affichées en haut à droite et en haut à gauche dans des viewport.
Ses fonctionnalités et capacités étaient assez réduites : il pouvait monter, descendre et se déplacer à l’aide des touches fléchées. Il était donc crucial pour nous d’intégrer des fonctionnalités supplémentaires et d’améliorer la mise en place de l’algorithme de stabilisation afin de le rendre plus réaliste.
Après avoir découvert Raydium, nous avons envisagé de reprogrammer le simulateur en utilisant un autre moteur graphique afin d’améliorer fortement la qualité visuelle du simulateur. Nous avions choisi Irrlicht Engine pour sa simplicité, sa gratuité et son langage : le C++. Afin de gérer la physique nous souhaitions lui adjoindre le moteur physique Newton Game Dynamics, toujours à cause de sa gratuité et du langage C++.
Modèle 3D de l’an dernier pour l’ancien drone

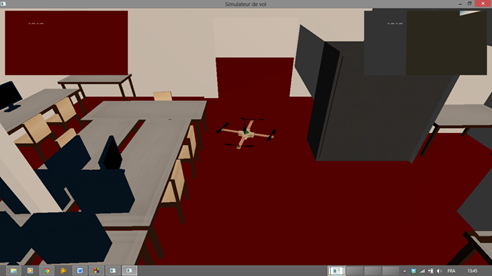
Capture d’écran du simulateur en début de projet
Mis à jour par Anonyme il y a environ 12 ans · 2 révisions